The singular value decomposition (SVD) is a powerful matrix decomposition. It is used all the time in statistics and numerical linear algebra. The SVD is at the heart of the principal component analysis, it demonstrates what’s going on in ridge regression and it is one way to construct the Moore-Penrose inverse of a matrix. For more SVD love, see the tweets below.
In this post I’ll define the SVD and prove that it always exists. At the end we’ll look at some pictures to better understand what’s going on.
Definition
Let  be a
be a  matrix. We will define the singular value decomposition first in the case
matrix. We will define the singular value decomposition first in the case  . The SVD consists of three matrix
. The SVD consists of three matrix  and
and  such that
such that  . The matrix
. The matrix  is required to be diagonal with non-negative diagonal entries
is required to be diagonal with non-negative diagonal entries  . These numbers are called the singular values of . The matrices
. These numbers are called the singular values of . The matrices  and
and  are required to orthogonal matrices so that
are required to orthogonal matrices so that  , the
, the  identity matrix. Note that since is square we also have
identity matrix. Note that since is square we also have  however we won’t have
however we won’t have  unless
unless  .
.
In the case when  , we can define the SVD of in terms of the SVD of
, we can define the SVD of in terms of the SVD of  . Let
. Let  and
and  be the SVD of so that
be the SVD of so that  . The SVD of is then given by transposing both sides of this equation giving
. The SVD of is then given by transposing both sides of this equation giving  and
and  .
.
Construction
The SVD of a matrix can be found by iteratively solving an optimisation problem. We will first describe an iterative procedure that produces matrices and . We will then verify that  and satisfy the defining properties of the SVD.
and satisfy the defining properties of the SVD.
We will construct the matrices and one column at a time and we will construct the diagonal matrix one entry at a time. To construct the first columns and entries, recall that the matrix is really a linear function from  to
to  given by
given by  . We can thus define the operator norm of via
. We can thus define the operator norm of via

where  represents the Euclidean norm of
represents the Euclidean norm of  and
and  is the Euclidean norm of
is the Euclidean norm of  . The set of vectors
. The set of vectors  is a compact set and the function
is a compact set and the function  is continuous. Thus, the supremum used to define
is continuous. Thus, the supremum used to define  is achieved at some vector
is achieved at some vector  . Define
. Define  . If
. If  , then define
, then define  . If
. If  , then define
, then define  to be an arbitrary vector in with
to be an arbitrary vector in with  . To summarise we have
. To summarise we have
We have now started to fill in our SVD. The number  is the first singular value of and the vectors
is the first singular value of and the vectors  and will be the first columns of the matrices and respectively.
and will be the first columns of the matrices and respectively.
Now suppose that we have found the first  singular values
singular values  and the first columns of and . If
and the first columns of and . If  , then we are done. Otherwise we repeat a similar process.
, then we are done. Otherwise we repeat a similar process.
Let  and
and  be the first columns of and . The vectors split into two subspaces. These subspaces are
be the first columns of and . The vectors split into two subspaces. These subspaces are  and
and  , the orthogonal compliment of
, the orthogonal compliment of  . By restricting to
. By restricting to  we get a new linear map
we get a new linear map  . Like before, the operator norm of
. Like before, the operator norm of  is defined to be
is defined to be
 .
.
Since  we must have
we must have

The set  is a compact set and thus there exists a vector
is a compact set and thus there exists a vector  such that
such that  . As before define
. As before define  and
and  if
if  . If
. If  , then define
, then define  to be any vector in
to be any vector in  that is orthogonal to
that is orthogonal to  .
.
This process repeats until eventually and we have produced matrices and . In the next section, we will argue that these three matrices satisfy the properties of the SVD.
Correctness
The defining properties of the SVD were given at the start of this post. We will see that most of the properties follow immediately from the construction but one of them requires a bit more analysis. Let ![U = [u_1,\ldots,u_p]](https://s0.wp.com/latex.php?latex=U+%3D+%5Bu_1%2C%5Cldots%2Cu_p%5D&bg=ffffff&fg=333333&s=0&c=20201002) ,
,  and
and ![V= [v_1,\ldots,v_p]](https://s0.wp.com/latex.php?latex=V%3D+%5Bv_1%2C%5Cldots%2Cv_p%5D&bg=ffffff&fg=333333&s=0&c=20201002) be the output from the above construction.
be the output from the above construction.
First note that by construction  are orthogonal since we always had
are orthogonal since we always had  . It follows that the matrix is orthogonal and so
. It follows that the matrix is orthogonal and so  .
.
The matrix is diagonal by construction. Furthermore, we have that  for every . This is because both
for every . This is because both  and
and  were defined as maximum value of over different subsets of . The subset for contained the subset for and thus
were defined as maximum value of over different subsets of . The subset for contained the subset for and thus  .
.
We’ll next verify that . Since is orthogonal, the vectors  form an orthonormal basis for . It thus suffices to check that
form an orthonormal basis for . It thus suffices to check that  for
for  . Again by the orthogonality of we have that
. Again by the orthogonality of we have that  , the
, the  standard basis vector. Thus,
standard basis vector. Thus,

Above, we used that was a diagonal matrix and that  is the column of . If
is the column of . If  , then
, then  by definition. If
by definition. If  , then
, then  and so
and so  also. Thus, in either case,
also. Thus, in either case,  and so
and so  .
.
The last property we need to verify is that is orthogonal. Note that this isn’t obvious. At each stage of the process, we made sure that . However, in the case that  , we simply defined . It is not clear why this would imply that is orthogonal to .
, we simply defined . It is not clear why this would imply that is orthogonal to .
It turns out that a geometric argument is needed to show this. The idea is that if was not orthogonal to  for some
for some  , then
, then  couldn’t have been the value that maximises .
couldn’t have been the value that maximises .
Let  and be two columns of with
and be two columns of with  and
and  . We wish to show that
. We wish to show that  . To show this we will use the fact that and
. To show this we will use the fact that and  are orthonormal and perform “polar-interpolation“. That is, for
are orthonormal and perform “polar-interpolation“. That is, for ![\lambda \in [0,1]](https://s0.wp.com/latex.php?latex=%5Clambda+%5Cin+%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002) , define
, define

Since  and are orthogonal, we have that
and are orthogonal, we have that

Furthermore  is orthogonal to
is orthogonal to  . Thus, by definition of ,
. Thus, by definition of ,

By the linearity of and the definitions of  ,
,
 .
.
Since  and
and  , we have
, we have

Rearranging and dividing by  gives,
gives,
 for all
for all ![\lambda \in (0,1]](https://s0.wp.com/latex.php?latex=%5Clambda+%5Cin+%280%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002)
Taking  gives
gives  . Performing the same polar interpolation with
. Performing the same polar interpolation with  shows that
shows that  and hence .
and hence .
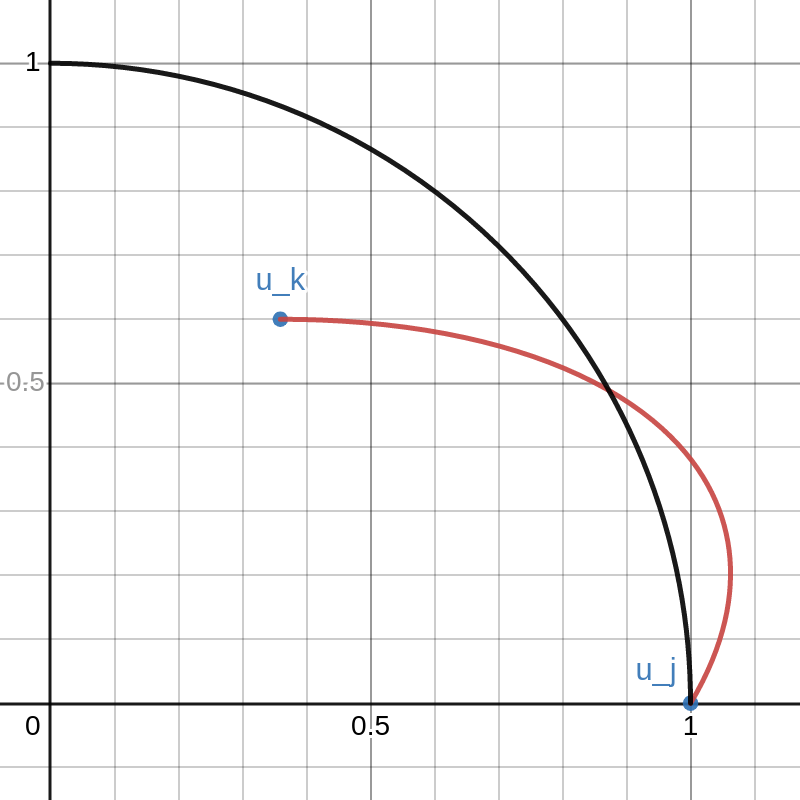
We have thus proved that is orthogonal. This proof is pretty “slick” but it isn’t very illuminating. To better demonstrate the concept, I made an interactive Desmos graph that you can access here.
This graph shows example vectors  . The vector is fixed at
. The vector is fixed at  and a quarter circle of radius
and a quarter circle of radius  is drawn. Any vectors
is drawn. Any vectors  that are outside this circle have
that are outside this circle have  .
.
The vector can be moved around inside this quarter circle. This can be done either cby licking and dragging on the point or changing that values of  and
and  on the left. The red curve is the path of
on the left. The red curve is the path of
 .
.
As  goes from
goes from  to , the path travels from to .
to , the path travels from to .
Note that there is a portion of the red curve near that is outside the black circle. This corresponds to a small value of  that results in
that results in  contradicting the definition of . By moving the point around in the plot you can see that this always happens unless lies exactly on the y-axis. That is, unless is orthogonal to .
contradicting the definition of . By moving the point around in the plot you can see that this always happens unless lies exactly on the y-axis. That is, unless is orthogonal to .


























instead of
. ↩︎
![U \in [-1,1]](https://s0.wp.com/latex.php?latex=U+%5Cin+%5B-1%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002) and
and ![V \in [0,1]](https://s0.wp.com/latex.php?latex=V+%5Cin+%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002) are independent and uniformly distributed. Then
are independent and uniformly distributed. Then  has the ratio of uniforms distribution. The plot below shows a histogram based on 10,000 samples from the ratio of uniforms distribution
has the ratio of uniforms distribution. The plot below shows a histogram based on 10,000 samples from the ratio of uniforms distribution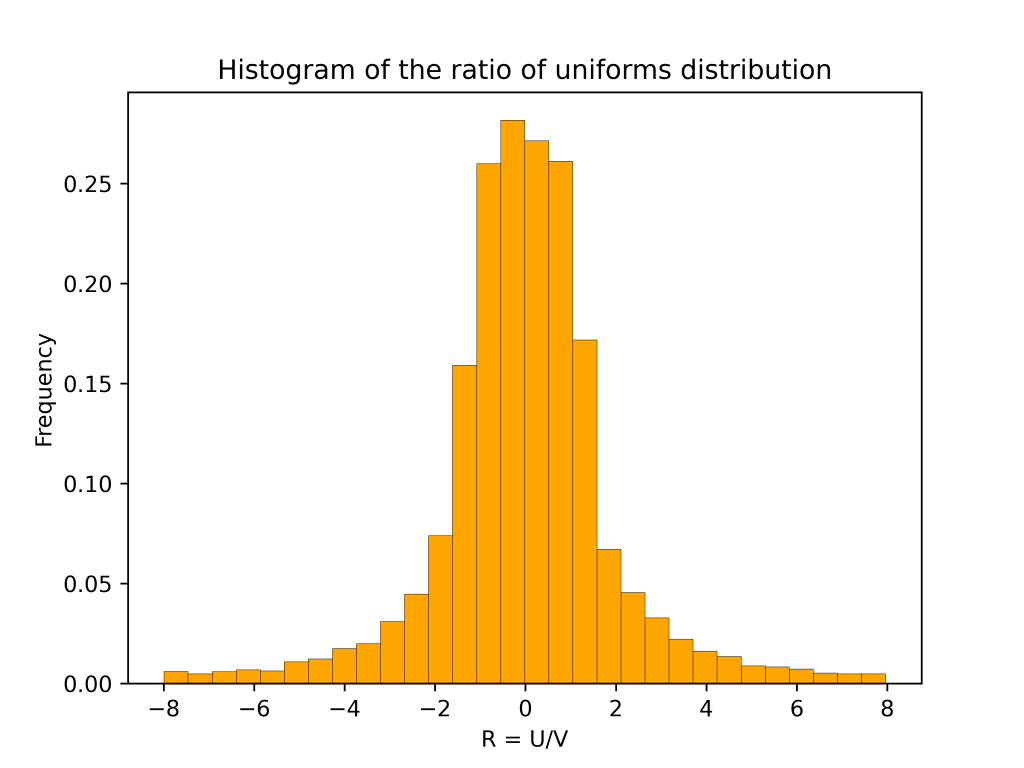
 also has a table mountain shape.
also has a table mountain shape. 


 corresponds to the flat part of the table mountain. The second case corresponds to the sloping curves. The rest of this post use geometry to derive the above formula for
corresponds to the flat part of the table mountain. The second case corresponds to the sloping curves. The rest of this post use geometry to derive the above formula for  .
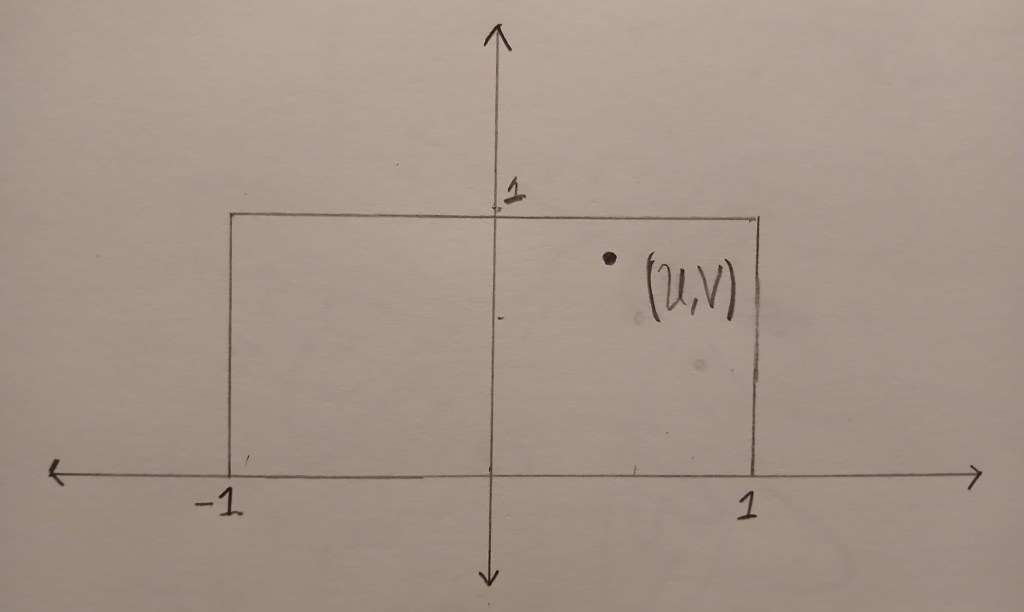
. is uniformly distributed in the box
is uniformly distributed in the box ![B=[-1,1] \times [0,1]](https://s0.wp.com/latex.php?latex=B%3D%5B-1%2C1%5D+%5Ctimes+%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002) . The image below shows an example of a point
. The image below shows an example of a point  .
.
 and goes through
and goes through  . The
. The  .
.
![[R,R+dR]](https://s0.wp.com/latex.php?latex=%5BR%2CR%2BdR%5D&bg=ffffff&fg=333333&s=0&c=20201002) is
is ![\displaystyle{\frac{\text{Area}(\{(u,v) \in B : u/v \in [R, R+dR]\})}{\text{Area}(B)} = \frac{1}{2}\text{Area}(\{(u,v) \in B : u/v \in [R, R+dR]\}).}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B%5Cfrac%7B%5Ctext%7BArea%7D%28%5C%7B%28u%2Cv%29+%5Cin+B+%3A+u%2Fv+%5Cin+%5BR%2C+R%2BdR%5D%5C%7D%29%7D%7B%5Ctext%7BArea%7D%28B%29%7D+%3D+%5Cfrac%7B1%7D%7B2%7D%5Ctext%7BArea%7D%28%5C%7B%28u%2Cv%29+%5Cin+B+%3A+u%2Fv+%5Cin+%5BR%2C+R%2BdR%5D%5C%7D%29.%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{h(R) = \lim_{dR \to 0} \frac{1}{2dR}\text{Area}(\{(u,v) \in B : u/v \in [R, R+dR]\})}.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7Bh%28R%29+%3D+%5Clim_%7BdR+%5Cto+0%7D+%5Cfrac%7B1%7D%7B2dR%7D%5Ctext%7BArea%7D%28%5C%7B%28u%2Cv%29+%5Cin+B+%3A+u%2Fv+%5Cin+%5BR%2C+R%2BdR%5D%5C%7D%29%7D.&bg=ffffff&fg=333333&s=0&c=20201002)
 and
and ![\{(u,v) \in B : u/v \in [R, R+dR]\}](https://s0.wp.com/latex.php?latex=%5C%7B%28u%2Cv%29+%5Cin+B+%3A+u%2Fv+%5Cin+%5BR%2C+R%2BdR%5D%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002) is a triangle. This triangle is drawn in blue below.
is a triangle. This triangle is drawn in blue below.
 . The perpendicular height of the triangle from the horizontal edge is
. The perpendicular height of the triangle from the horizontal edge is ![\displaystyle{\text{Area}(\{(u,v) \in B : u/v \in [R, R+dR]\}) =\frac{1}{2}\times dR \times 1=\frac{dR}{2}}.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B%5Ctext%7BArea%7D%28%5C%7B%28u%2Cv%29+%5Cin+B+%3A+u%2Fv+%5Cin+%5BR%2C+R%2BdR%5D%5C%7D%29+%3D%5Cfrac%7B1%7D%7B2%7D%5Ctimes+dR+%5Ctimes+1%3D%5Cfrac%7BdR%7D%7B2%7D%7D.&bg=ffffff&fg=333333&s=0&c=20201002)
![R \in [-1,1]](https://s0.wp.com/latex.php?latex=R+%5Cin+%5B-1%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002) we have
we have

 . The perpendicular height of the triangle from the vertical edge is
. The perpendicular height of the triangle from the vertical edge is ![\displaystyle{\text{Area}(\{(u,v) \in B : u/v \in [R, R+dR]\}) =\frac{1}{2}\times \frac{dR}{R(R+dR)} \times 1=\frac{dR}{2R(R+dR)}}.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B%5Ctext%7BArea%7D%28%5C%7B%28u%2Cv%29+%5Cin+B+%3A+u%2Fv+%5Cin+%5BR%2C+R%2BdR%5D%5C%7D%29+%3D%5Cfrac%7B1%7D%7B2%7D%5Ctimes+%5Cfrac%7BdR%7D%7BR%28R%2BdR%29%7D+%5Ctimes+1%3D%5Cfrac%7BdR%7D%7B2R%28R%2BdR%29%7D%7D.&bg=ffffff&fg=333333&s=0&c=20201002)

 and
and  . This is because the ratio of uniform distribution has heavy tails. This meant that there were some very large values of
. This is because the ratio of uniform distribution has heavy tails. This meant that there were some very large values of  functions
functions  and we want to sample from the probability distribution
and we want to sample from the probability distribution  That is
That is
 is a normalizing constant. If the set
is a normalizing constant. If the set  is very large, then it may be difficult to compute
is very large, then it may be difficult to compute  or sample from
or sample from  . To approximately sample from
. To approximately sample from  , we add a auxiliary variable
, we add a auxiliary variable  such that
such that ![\displaystyle{P(U \mid X) = \prod_{i=1}^n \mathrm{Unif}[0,f_i(X)]}.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BP%28U+%5Cmid+X%29+%3D+%5Cprod_%7Bi%3D1%7D%5En+%5Cmathrm%7BUnif%7D%5B0%2Cf_i%28X%29%5D%7D.&bg=ffffff&fg=333333&s=0&c=20201002)
 are independent and
are independent and  is uniformly distributed on the interval
is uniformly distributed on the interval ![[0,f_i(X)]](https://s0.wp.com/latex.php?latex=%5B0%2Cf_i%28X%29%5D&bg=ffffff&fg=333333&s=0&c=20201002) . If
. If  and
and ![\displaystyle{P(X,U) =P(X)P(U\mid X)\propto \prod_{i=1}^n f_i(X) \frac{1}{f_i(X)} I[U_i \le f(X_i)] = \prod_{i=1}^n I[U_i \le f(X_i)]}.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BP%28X%2CU%29+%3DP%28X%29P%28U%5Cmid+X%29%5Cpropto++%5Cprod_%7Bi%3D1%7D%5En+f_i%28X%29+%5Cfrac%7B1%7D%7Bf_i%28X%29%7D+I%5BU_i+%5Cle+f%28X_i%29%5D+%3D+%5Cprod_%7Bi%3D1%7D%5En+I%5BU_i+%5Cle+f%28X_i%29%5D%7D.&bg=ffffff&fg=333333&s=0&c=20201002)
 is uniform on the set
is uniform on the set 
 . Then, the above calculation shows that if we discard
. Then, the above calculation shows that if we discard  from
from  and then sampling
and then sampling  from
from  . Since the joint distribution of
. Since the joint distribution of  and
and  .
.
 , it might be difficult to do this. Fortunately, there are some notable examples where this step has been worked out. The very first example of auxiliary variables is the Swendsen-Wang algorithm for sampling from the Ising model [2]. In this model it is possible to sample uniformly from
, it might be difficult to do this. Fortunately, there are some notable examples where this step has been worked out. The very first example of auxiliary variables is the Swendsen-Wang algorithm for sampling from the Ising model [2]. In this model it is possible to sample uniformly from  . Another setting where we can sample exactly is when
. Another setting where we can sample exactly is when  and each
and each  but an unknown rate
but an unknown rate ![\rho \in [0,1]](https://s0.wp.com/latex.php?latex=%5Crho+%5Cin+%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002) . The rate
. The rate  is given a
is given a  prior. That is the prior distribution of
prior. That is the prior distribution of 
 is a normalizing constant. The model can thus be written as
is a normalizing constant. The model can thus be written as


 .
. . To calculate the distribution of
. To calculate the distribution of 


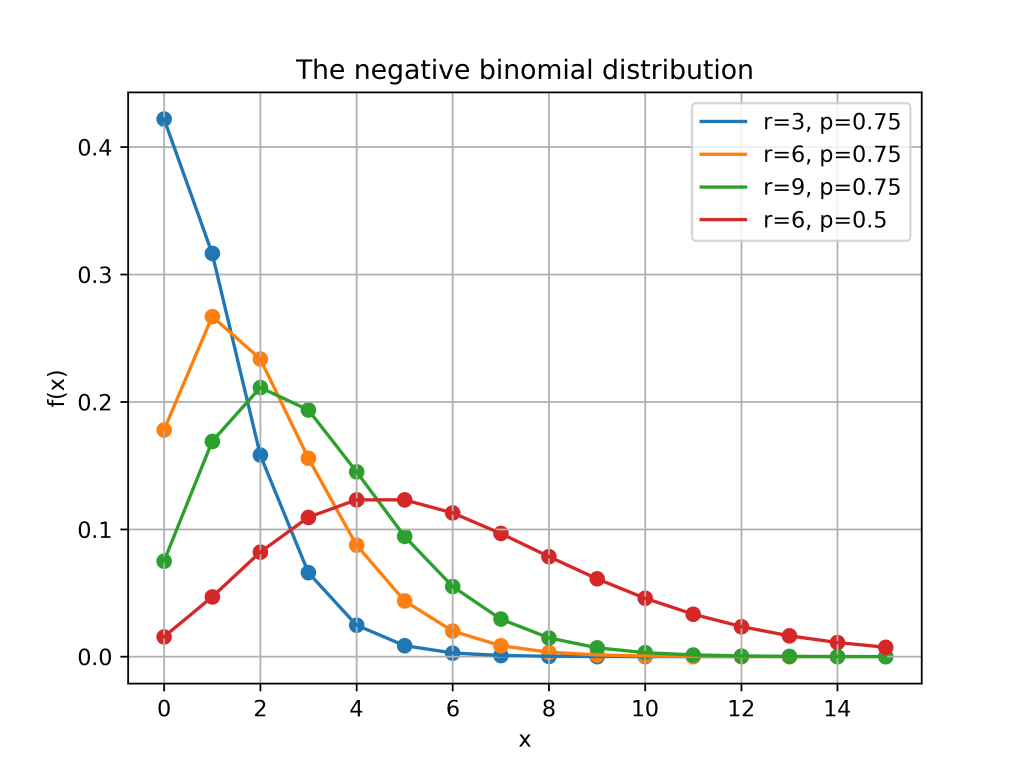
 for
for  and a number of different values of
and a number of different values of 
 and
and  and we want to test if they are from the same distribution. Many popular tests can be reinterpreted as correlation tests by pooling the two samples and introducing a dummy variable that encodes which sample each data point comes from. In this post we will see how this plays out in a simple t-test.
and we want to test if they are from the same distribution. Many popular tests can be reinterpreted as correlation tests by pooling the two samples and introducing a dummy variable that encodes which sample each data point comes from. In this post we will see how this plays out in a simple t-test. and
and  , where
, where  is unknown. Our hypothesis that
is unknown. Our hypothesis that  . The test statistic is
. The test statistic is ,
, and
and  are the two sample means. The variable
are the two sample means. The variable  is the pooled estimate of the standard deviation and is given by
is the pooled estimate of the standard deviation and is given by .
. follows the T-distribution with
follows the T-distribution with  degrees of freedom. We thus reject the null
degrees of freedom. We thus reject the null  when
when  exceeds the
exceeds the  quantile of the T-distribution.
quantile of the T-distribution.  be the pooled data and for
be the pooled data and for  , define
, define  by
by 
 can be rewritten as
can be rewritten as 
 . That is, we have expressed our modelling assumptions as a linear model. When working with this linear model, the hypothesis
. That is, we have expressed our modelling assumptions as a linear model. When working with this linear model, the hypothesis  . To test
. To test 
 is the ordinary least squares estimate of
is the ordinary least squares estimate of  ,
,  is the design matrix and
is the design matrix and  is an estimate of
is an estimate of  given by
given by
 is the fitted value of
is the fitted value of  .
. is exactly equal to
is exactly equal to ![[1,x_i]](https://s0.wp.com/latex.php?latex=%5B1%2Cx_i%5D&bg=ffffff&fg=333333&s=0&c=20201002) and is thus equal to
and is thus equal to


 . So,
. So,


 and
and 
 , we only need to show that
, we only need to show that  . To do this, note that the fitted values
. To do this, note that the fitted values  are equal to
are equal to

 . Therefore,
. Therefore,  and the two sample t-test is equivalent to a correlation test.
and the two sample t-test is equivalent to a correlation test. requires creating independent samples
requires creating independent samples  . The idea is if
. The idea is if  are i.i.d. from
are i.i.d. from  , then for any test statistic
, then for any test statistic  , the rank of
, the rank of  among
among  is uniformly distributed on
is uniformly distributed on  . This means that if
. This means that if  , then we can reject the hypothesis
, then we can reject the hypothesis  at the significance level
at the significance level  .
.  is just as intractable as theoretically studying the distribution of
is just as intractable as theoretically studying the distribution of  A Markov chain with transition matrix
A Markov chain with transition matrix 
 . This means that if
. This means that if  is a Markov chain with transition matrix
is a Markov chain with transition matrix  is distributed according to
is distributed according to  is also distributed according to
is also distributed according to  are distributed according to
are distributed according to  from
from  . The transition matrix
. The transition matrix  in
in  . That is the chance of drawing
. That is the chance of drawing 
 and let
and let  be a Markov chain with transition matrix
be a Markov chain with transition matrix  be a Markov chain with transition matrix
be a Markov chain with transition matrix  ,
, means equal in distribution.
means equal in distribution. 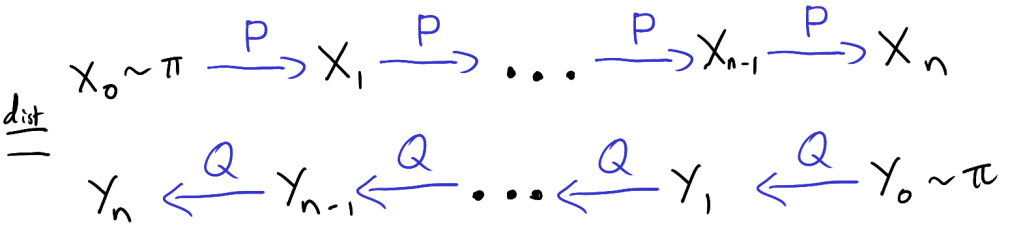
 where
where  is our observed data and
is our observed data and  which we will use to detect outliers. This function is the same function we would use in a regular Monte Carlo test. Namely, we want to reject the null hypothesis when
which we will use to detect outliers. This function is the same function we would use in a regular Monte Carlo test. Namely, we want to reject the null hypothesis when  is much larger than we would expect under
is much larger than we would expect under  uniformly in
uniformly in  and set
and set  . We then generate
. We then generate  as a Markov chain with transition matrix
as a Markov chain with transition matrix  as a Markov chain that starts from
as a Markov chain that starts from 
 and count the number of
and count the number of  such that
such that  . If there are
. If there are  is at most
is at most 
 .
. 
 does not depend on
does not depend on  with initial distribution
with initial distribution  independently of
independently of  . This is enough to show that the serial method produces valid p-values. The idea is that since the distribution of
. This is enough to show that the serial method produces valid p-values. The idea is that since the distribution of  is in the top
is in the top  , let
, let  be the event that
be the event that  is in the top
is in the top  . That is,
. That is, .
. be the indicator function for the event
be the indicator function for the event  values of
values of  can be in the top
can be in the top  ,
,
 ,
, ,
,  is
is  for all
for all  .
. .
. . She explains that when an equation says two things are equal we very rarely mean that they are exactly the same thing. What we really mean is that the two things are the same in some ways even though they may be different in others.
. She explains that when an equation says two things are equal we very rarely mean that they are exactly the same thing. What we really mean is that the two things are the same in some ways even though they may be different in others.  . This is such a familiar statement that you might really think that
. This is such a familiar statement that you might really think that  and
and  are the same thing. Indeed, if
are the same thing. Indeed, if  is the same as the number you get when you calculate
is the same as the number you get when you calculate  . But calculating
. But calculating  , then calculating
, then calculating  but calculating
but calculating  is the same as
is the same as  .
. and any pair of vectors
and any pair of vectors  , if
, if  , then
, then  is invertible and
is invertible and
 of size
of size  that satisfy the above condition.
that satisfy the above condition.  and now want the inverse of
and now want the inverse of  computations since we have to invert a
computations since we have to invert a  matrix. On the right hand side, we only need to compute a small number of matrix-vector products and then add two matrices together. This bring the computational cost down to
matrix. On the right hand side, we only need to compute a small number of matrix-vector products and then add two matrices together. This bring the computational cost down to  .
.  comes from a distribution of the form:
comes from a distribution of the form: ,
, is a vector and
is a vector and  is equal to the probability that
is equal to the probability that  are the parameters for the
are the parameters for the  ,
, . We can see that the log-likelihood is of the form log-sum-exp. Calculating a log-sum-exp can cause issues with numerical stability. For instance if
. We can see that the log-likelihood is of the form log-sum-exp. Calculating a log-sum-exp can cause issues with numerical stability. For instance if  and
and  , for all
, for all  , then the final answer is simply
, then the final answer is simply  . However, as soon as we try to calculate
. However, as soon as we try to calculate  on a computer, we’ll be in trouble.
on a computer, we’ll be in trouble.  ,
, .
. we can more safely compute the log-sum-exp expression. For instance, in the
we can more safely compute the log-sum-exp expression. For instance, in the  . This (hopefully) makes each of the terms
. This (hopefully) makes each of the terms  a reasonable size and avoids any numerical issues.
a reasonable size and avoids any numerical issues. 
 .
.  . Given a vector
. Given a vector  , the non-central chi-squared distribution with
, the non-central chi-squared distribution with  is the distribution of the quantity
is the distribution of the quantity
 . As this notation suggests, the distribution of
. As this notation suggests, the distribution of  depends only on
depends only on  , the norm of
, the norm of  . The first few times I heard this fact, I had no idea why it would be true (and even found it a little
. The first few times I heard this fact, I had no idea why it would be true (and even found it a little  such that
such that  . We wish to show that if
. We wish to show that if  , then
, then  .
. have the same norm there exists an orthogonal matrix
have the same norm there exists an orthogonal matrix  such that
such that  . Since
. Since  . Furthermore, since
. Furthermore, since  . This is because, for all
. This is because, for all  ,
,
 .
. have the same distribution, we can conclude that
have the same distribution, we can conclude that  has the same distribution as
has the same distribution as  . Since
. Since  , we are done.
, we are done. depends only on the norm of the vector
depends only on the norm of the vector  and then return
and then return  . But for large values of
. But for large values of  where
where  is the vector with a
is the vector with a 
 follows the regular chi-squared distribution with
follows the regular chi-squared distribution with  degrees of freedom and is independent of
degrees of freedom and is independent of  . The regular chi-squared distribution is a special case of the gamma distribution and can be effectively sampled with rejection sampling for large shape parameter (see
. The regular chi-squared distribution is a special case of the gamma distribution and can be effectively sampled with rejection sampling for large shape parameter (see  , so for large values of
, so for large values of  . Finally to get a sample from
. Finally to get a sample from  .
. 
 .
. .
. with
with  and
and  .
.