Monte Carlo integration
John Cook recently wrote a cautionary blog post about using Monte Carlo to estimate the volume of a high-dimensional ball. He points out that if  are independent and uniformly distributed on the interval
are independent and uniformly distributed on the interval ![[-1,1]](https://s0.wp.com/latex.php?latex=%5B-1%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002) then
then

where  is the volume of an
is the volume of an  -dimensional ball with radius one. This observation means that we can use Monte Carlo to estimate .
-dimensional ball with radius one. This observation means that we can use Monte Carlo to estimate .
To do this we repeatedly sample vectors  with
with  uniform on and
uniform on and  ranging from
ranging from  to
to  . Next, we count the proportion of vectors
. Next, we count the proportion of vectors  with
with  . Specifically, if
. Specifically, if  is equal to one when and equal to zero otherwise, then by the law of large numbers
is equal to one when and equal to zero otherwise, then by the law of large numbers

Which implies

This method of approximating a volume or integral by sampling and counting is called Monte Carlo integration and is a powerful general tool in scientific computing.
The problem with Monte Carlo integration
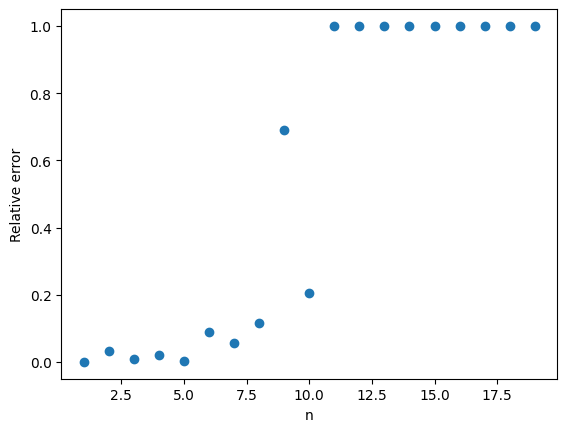
As pointed out by John, Monte Carlo integration does not work very well in this example. The plot below shows a large difference between the true value of with ranging from to  and the Monte Carlo approximation with
and the Monte Carlo approximation with  .
.
The problem is that is very small and the probability  is even smaller! For example when
is even smaller! For example when  ,
,  . This means that in our one thousand samples we only expect two or three occurrences of the event
. This means that in our one thousand samples we only expect two or three occurrences of the event  . As a result our estimate has a high variance.
. As a result our estimate has a high variance.
The results get even worse as increases. The probability does to zero faster than exponentially. Even with a large value of , our estimate will be zero. Since  , the relative error in the approximation is 100%.
, the relative error in the approximation is 100%.
Importance sampling
Monte Carlo can still be used to approximate . Instead of using plain Monte Carlo, we can use a variance reduction technique called importance sampling (IS). Instead of sampling the points  from the uniform distribution on , we can instead sample the from some other distribution called a proposal distribution. The proposal distribution should be chosen so that that the event
from the uniform distribution on , we can instead sample the from some other distribution called a proposal distribution. The proposal distribution should be chosen so that that the event  becomes more likely.
becomes more likely.
In importance sampling, we need to correct for the fact that we are using a new distribution instead of the uniform distribution. Instead of the counting the number of times  , we give weights to each of samples and then add up the weights.
, we give weights to each of samples and then add up the weights.
If  is the density of the uniform distribution on (the target distribution) and
is the density of the uniform distribution on (the target distribution) and  is the density of the proposal distribution, then the IS Monte Carlo estimate of is
is the density of the proposal distribution, then the IS Monte Carlo estimate of is

where as before is one if  and is zero otherwise. As long as
and is zero otherwise. As long as  implies
implies  , the IS Monte Carlo estimate will be an unbiased estimate of . More importantly, a good choice of the proposal distribution can drastically reduce the variance of the IS estimate compared to the plain Monte Carlo estimate.
, the IS Monte Carlo estimate will be an unbiased estimate of . More importantly, a good choice of the proposal distribution can drastically reduce the variance of the IS estimate compared to the plain Monte Carlo estimate.
In this example, a good choice of proposal distribution is the normal distribution with mean  and variance
and variance  . Under this proposal distribution, the expected value of
. Under this proposal distribution, the expected value of  is one and so the event is much more likely.
is one and so the event is much more likely.
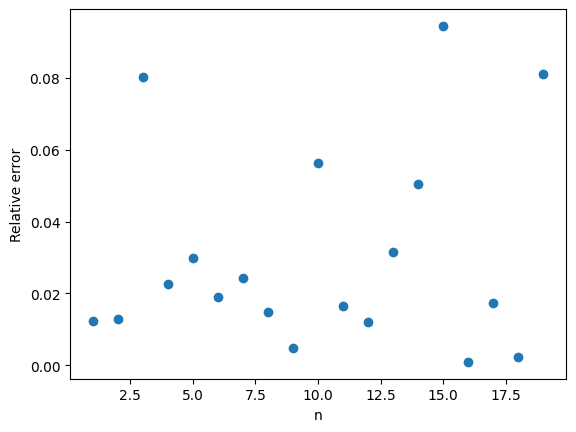
Here are the IS Monte Carlo estimates with again and ranging from to . The results speak for themselves.
The relative error is typically less than 10%. A big improvement over the 100% relative error of plain Monte Carlo.
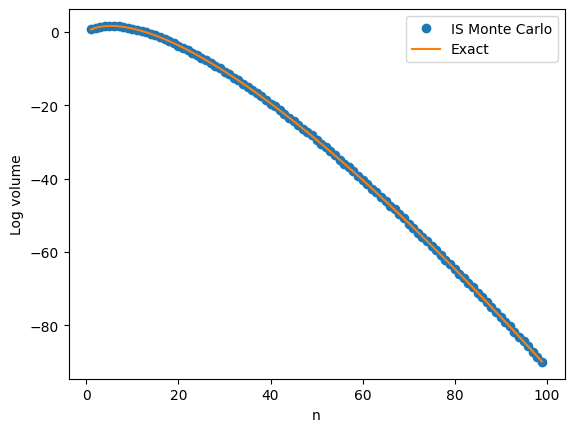
The next plot shows a close agreement between and the IS Monte Carlo approximation on the log scale with going all the way up to  .
.
Notes
- There are exact formulas for (available on Wikipedia). I used these to compare the approximations and compute relative errors. There are related problems where no formulas exist and Monte Carlo integration is one of the only ways to get an approximate answer.
- The post by John Cook also talks about why the central limit theorem can’t be used to approximate . I initially thought a technique called large deviations could be used to approximate but again this does not directly apply. I was happy to discover that importance sampling worked so well!
More sampling posts



























instead of
. ↩︎
![U \in [-1,1]](https://s0.wp.com/latex.php?latex=U+%5Cin+%5B-1%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002) and
and ![V \in [0,1]](https://s0.wp.com/latex.php?latex=V+%5Cin+%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002) are independent and uniformly distributed. Then
are independent and uniformly distributed. Then  has the ratio of uniforms distribution. The plot below shows a histogram based on 10,000 samples from the ratio of uniforms distribution
has the ratio of uniforms distribution. The plot below shows a histogram based on 10,000 samples from the ratio of uniforms distribution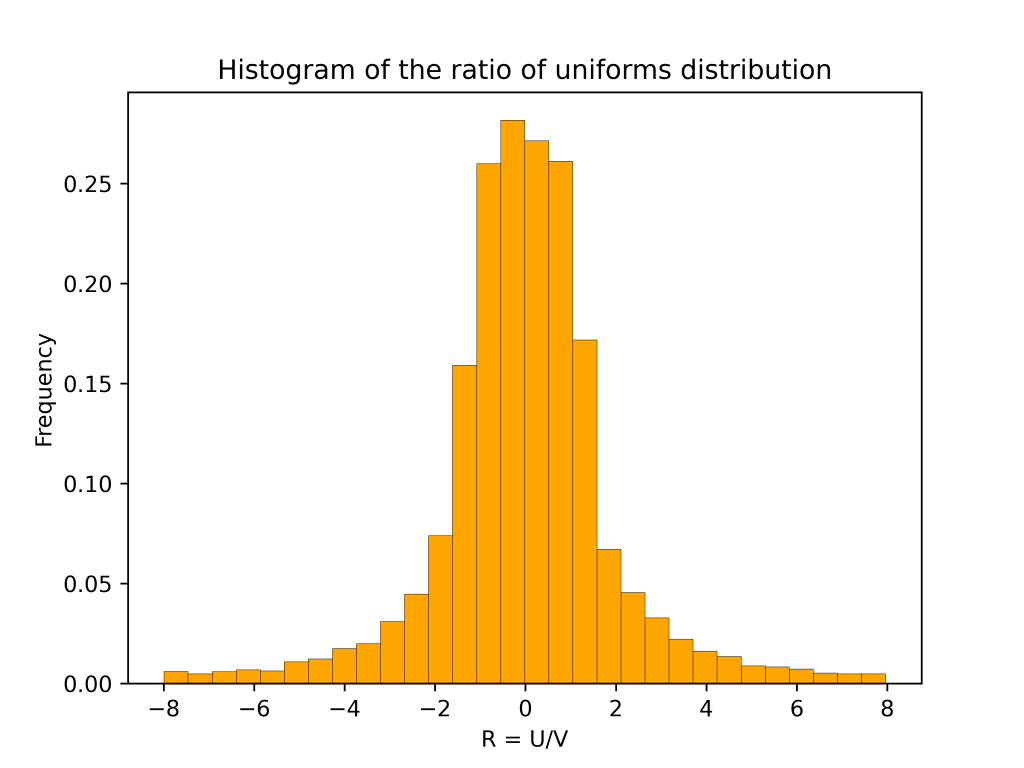
 also has a table mountain shape.
also has a table mountain shape. 


 corresponds to the flat part of the table mountain. The second case corresponds to the sloping curves. The rest of this post use geometry to derive the above formula for
corresponds to the flat part of the table mountain. The second case corresponds to the sloping curves. The rest of this post use geometry to derive the above formula for  .
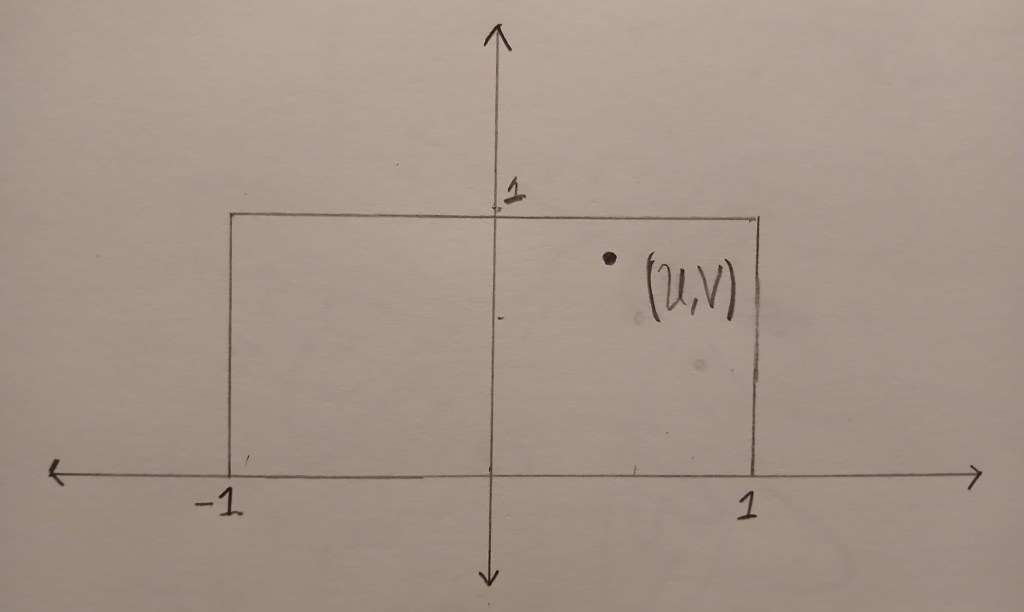
. is uniformly distributed in the box
is uniformly distributed in the box ![B=[-1,1] \times [0,1]](https://s0.wp.com/latex.php?latex=B%3D%5B-1%2C1%5D+%5Ctimes+%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002) . The image below shows an example of a point
. The image below shows an example of a point  .
.
 and goes through
and goes through  . The
. The  .
.
![[R,R+dR]](https://s0.wp.com/latex.php?latex=%5BR%2CR%2BdR%5D&bg=ffffff&fg=333333&s=0&c=20201002) is
is ![\displaystyle{\frac{\text{Area}(\{(u,v) \in B : u/v \in [R, R+dR]\})}{\text{Area}(B)} = \frac{1}{2}\text{Area}(\{(u,v) \in B : u/v \in [R, R+dR]\}).}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B%5Cfrac%7B%5Ctext%7BArea%7D%28%5C%7B%28u%2Cv%29+%5Cin+B+%3A+u%2Fv+%5Cin+%5BR%2C+R%2BdR%5D%5C%7D%29%7D%7B%5Ctext%7BArea%7D%28B%29%7D+%3D+%5Cfrac%7B1%7D%7B2%7D%5Ctext%7BArea%7D%28%5C%7B%28u%2Cv%29+%5Cin+B+%3A+u%2Fv+%5Cin+%5BR%2C+R%2BdR%5D%5C%7D%29.%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{h(R) = \lim_{dR \to 0} \frac{1}{2dR}\text{Area}(\{(u,v) \in B : u/v \in [R, R+dR]\})}.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7Bh%28R%29+%3D+%5Clim_%7BdR+%5Cto+0%7D+%5Cfrac%7B1%7D%7B2dR%7D%5Ctext%7BArea%7D%28%5C%7B%28u%2Cv%29+%5Cin+B+%3A+u%2Fv+%5Cin+%5BR%2C+R%2BdR%5D%5C%7D%29%7D.&bg=ffffff&fg=333333&s=0&c=20201002)
 and
and ![\{(u,v) \in B : u/v \in [R, R+dR]\}](https://s0.wp.com/latex.php?latex=%5C%7B%28u%2Cv%29+%5Cin+B+%3A+u%2Fv+%5Cin+%5BR%2C+R%2BdR%5D%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002) is a triangle. This triangle is drawn in blue below.
is a triangle. This triangle is drawn in blue below.
 . The perpendicular height of the triangle from the horizontal edge is
. The perpendicular height of the triangle from the horizontal edge is ![\displaystyle{\text{Area}(\{(u,v) \in B : u/v \in [R, R+dR]\}) =\frac{1}{2}\times dR \times 1=\frac{dR}{2}}.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B%5Ctext%7BArea%7D%28%5C%7B%28u%2Cv%29+%5Cin+B+%3A+u%2Fv+%5Cin+%5BR%2C+R%2BdR%5D%5C%7D%29+%3D%5Cfrac%7B1%7D%7B2%7D%5Ctimes+dR+%5Ctimes+1%3D%5Cfrac%7BdR%7D%7B2%7D%7D.&bg=ffffff&fg=333333&s=0&c=20201002)
![R \in [-1,1]](https://s0.wp.com/latex.php?latex=R+%5Cin+%5B-1%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002) we have
we have

 . The perpendicular height of the triangle from the vertical edge is
. The perpendicular height of the triangle from the vertical edge is ![\displaystyle{\text{Area}(\{(u,v) \in B : u/v \in [R, R+dR]\}) =\frac{1}{2}\times \frac{dR}{R(R+dR)} \times 1=\frac{dR}{2R(R+dR)}}.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B%5Ctext%7BArea%7D%28%5C%7B%28u%2Cv%29+%5Cin+B+%3A+u%2Fv+%5Cin+%5BR%2C+R%2BdR%5D%5C%7D%29+%3D%5Cfrac%7B1%7D%7B2%7D%5Ctimes+%5Cfrac%7BdR%7D%7BR%28R%2BdR%29%7D+%5Ctimes+1%3D%5Cfrac%7BdR%7D%7B2R%28R%2BdR%29%7D%7D.&bg=ffffff&fg=333333&s=0&c=20201002)

 and
and  . This is because the ratio of uniform distribution has heavy tails. This meant that there were some very large values of
. This is because the ratio of uniform distribution has heavy tails. This meant that there were some very large values of  . It is a u-shaped distribution. There are peaks at
. It is a u-shaped distribution. There are peaks at  .
.

 is distributed according to the discrete arcsine distribution with parameter
is distributed according to the discrete arcsine distribution with parameter  converges in distribution to the continuous arcsine distribution on
converges in distribution to the continuous arcsine distribution on ![[0,1]](https://s0.wp.com/latex.php?latex=%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002) . The continuous arcsine distribution has the probability density function
. The continuous arcsine distribution has the probability density function
 . It is called the arcsine distribution because the cumulative distribution function involves the arcsine function
. It is called the arcsine distribution because the cumulative distribution function involves the arcsine function
 . I was surprised when I was told this, and couldn’t find a reference. The rest of this blog post proves that the discrete arcsine distribution is an instance of the beta-binomial distribution.
. I was surprised when I was told this, and couldn’t find a reference. The rest of this blog post proves that the discrete arcsine distribution is an instance of the beta-binomial distribution.
 is the Beta-function. To show that the discrete arc sine distribution is an instance of the beta-binomial distribution we need that
is the Beta-function. To show that the discrete arc sine distribution is an instance of the beta-binomial distribution we need that  . That is
. That is ,
, . To prove the above equation, we can first do some simplifying to
. To prove the above equation, we can first do some simplifying to  . By definition
. By definition ,
, factorial if
factorial if  also satisfies the property
also satisfies the property  . Using this repeatedly gives
. Using this repeatedly gives

 is the double factorial. The same reasoning gives
is the double factorial. The same reasoning gives

 is also equal to the above final expression. Recall
is also equal to the above final expression. Recall
 (and hence
(and hence  ). To see why this last claim holds, note that
). To see why this last claim holds, note that
 as claimed.
as claimed. samples to estimate
samples to estimate 

 .
. . That is the distribution
. That is the distribution  is an
is an  . The conditional target distribution is
. The conditional target distribution is  the uniform distribution on the
the uniform distribution on the  . Here
. Here  is the Kullback-Liebler divergence between
is the Kullback-Liebler divergence between  . Kullback-Liebler divergence is defined as integral. Specifically
. Kullback-Liebler divergence is defined as integral. Specifically 
 to be the distribution of the norm squared under
to be the distribution of the norm squared under  , then
, then  and likewise for
and likewise for  . By the rotational symmetry of
. By the rotational symmetry of 
 and
and ![r \in [0,1]](https://s0.wp.com/latex.php?latex=r+%5Cin+%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002)

 . This means that
. This means that  . The distribution
. The distribution  , then
, then  is a scaled chi-squared variable. The shape parameter of
is a scaled chi-squared variable. The shape parameter of 


 we get that for large
we get that for large  .
.
 matrix
matrix  is orthogonal if
is orthogonal if  . The set of all
. The set of all  . The uniform distribution on
. The uniform distribution on  is an independent standard normal random variable. Let
is an independent standard normal random variable. Let  be the columns of
be the columns of  be the result of applying Gram-Schmidt to
be the result of applying Gram-Schmidt to  . Then the matrix
. Then the matrix ![M=[q_1,q_2,\ldots,q_n] \in O_n](https://s0.wp.com/latex.php?latex=M%3D%5Bq_1%2Cq_2%2C%5Cldots%2Cq_n%5D+%5Cin+O_n&bg=ffffff&fg=333333&s=0&c=20201002) is distributed according to Haar measure.
is distributed according to Haar measure. is a QR-factorization of
is a QR-factorization of  is distributed according to Haar measure. However, most numerical libraries do not use Gram-Schmidt to calculate the QR-factorization of a matrix. This means that if you generate a random
is distributed according to Haar measure. However, most numerical libraries do not use Gram-Schmidt to calculate the QR-factorization of a matrix. This means that if you generate a random 
 , the top-left entry of a matrix
, the top-left entry of a matrix  . We then compute a diagonal matrix
. We then compute a diagonal matrix  with
with  . Then, the matrix
. Then, the matrix  is Haar distributed. The following python code thus samples a Haar distributed matrix in
is Haar distributed. The following python code thus samples a Haar distributed matrix in  and we want to sample from the probability distribution
and we want to sample from the probability distribution  That is
That is
 is a normalizing constant. If the set
is a normalizing constant. If the set  is very large, then it may be difficult to compute
is very large, then it may be difficult to compute  or sample from
or sample from  . To approximately sample from
. To approximately sample from  , we add a auxiliary variable
, we add a auxiliary variable  such that
such that ![\displaystyle{P(U \mid X) = \prod_{i=1}^n \mathrm{Unif}[0,f_i(X)]}.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BP%28U+%5Cmid+X%29+%3D+%5Cprod_%7Bi%3D1%7D%5En+%5Cmathrm%7BUnif%7D%5B0%2Cf_i%28X%29%5D%7D.&bg=ffffff&fg=333333&s=0&c=20201002)
 are independent and
are independent and  is uniformly distributed on the interval
is uniformly distributed on the interval ![[0,f_i(X)]](https://s0.wp.com/latex.php?latex=%5B0%2Cf_i%28X%29%5D&bg=ffffff&fg=333333&s=0&c=20201002) . If
. If ![\displaystyle{P(X,U) =P(X)P(U\mid X)\propto \prod_{i=1}^n f_i(X) \frac{1}{f_i(X)} I[U_i \le f(X_i)] = \prod_{i=1}^n I[U_i \le f(X_i)]}.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BP%28X%2CU%29+%3DP%28X%29P%28U%5Cmid+X%29%5Cpropto++%5Cprod_%7Bi%3D1%7D%5En+f_i%28X%29+%5Cfrac%7B1%7D%7Bf_i%28X%29%7D+I%5BU_i+%5Cle+f%28X_i%29%5D+%3D+%5Cprod_%7Bi%3D1%7D%5En+I%5BU_i+%5Cle+f%28X_i%29%5D%7D.&bg=ffffff&fg=333333&s=0&c=20201002)
 is uniform on the set
is uniform on the set 
 . Then, the above calculation shows that if we discard
. Then, the above calculation shows that if we discard  and only keep
and only keep  from
from  and then sampling
and then sampling  from
from  . Since the joint distribution of
. Since the joint distribution of  and
and  .
.
 , it might be difficult to do this. Fortunately, there are some notable examples where this step has been worked out. The very first example of auxiliary variables is the Swendsen-Wang algorithm for sampling from the Ising model [2]. In this model it is possible to sample uniformly from
, it might be difficult to do this. Fortunately, there are some notable examples where this step has been worked out. The very first example of auxiliary variables is the Swendsen-Wang algorithm for sampling from the Ising model [2]. In this model it is possible to sample uniformly from  . Another setting where we can sample exactly is when
. Another setting where we can sample exactly is when  and each
and each 
 mph. Jack reaches Joe in 10 minutes which is one sixth of an hour. This means that the initial distance between them must have been
mph. Jack reaches Joe in 10 minutes which is one sixth of an hour. This means that the initial distance between them must have been  miles.
miles. 
 is an
is an  invertible matrix and
invertible matrix and  is a length
is a length  and solving the equation
and solving the equation  can both be done in
can both be done in  floating point operations (flops). This surprised me because naively computing the columns of
floating point operations (flops). This surprised me because naively computing the columns of 
 are the standard basis vectors. I thought this would mean that calculating
are the standard basis vectors. I thought this would mean that calculating  flops. Now to solve
flops. Now to solve  , we can simply factor
, we can simply factor  . Inverting the matrix requires the same order of flops as a single solve!
. Inverting the matrix requires the same order of flops as a single solve!